Chaque révolution du moteur pas à pas est divisée en un nombre de pas distincts, 200 pas dans la majorité des cas, et le moteur doit recevoir une impulsion distincte pour chaque pas. Le moteur pas à pas ne peut avoir qu’un seul pas à la fois, et chaque pas est de la même taille. Puisque chaque impulsion fait tourner le moteur à un angle précis, généralement de 1,8 °, la position du moteur peut être contrôlée sans aucun mécanisme de rétroaction. Lorsque les impulsions numériques augmentent en fréquence, le mouvement de pas se transforme en rotation continue, avec une vitesse de rotation directement proportionnelle à la fréquence des impulsions. Les moteurs pas à pas sont utilisés quotidiennement dans les applications industrielles et commerciales en raison de leur faible coût, de leur haute fiabilité, de leur couple élevé à basse vitesse et de leur construction simple et robuste qui fonctionne dans presque n’importe quel environnement.
Avantages des moteurs pas à pas
L’angle de rotation du moteur est proportionnel à l’impulsion d’entrée.
Le moteur a un couple complet à l’arrêt (si les enroulements sont sous tension).
Un positionnement précis et la répétabilité du mouvement puisque les bons moteurs pas à pas ont une précision de 3 à 5 % pour un pas et que cette erreur est non cumulative d’un pas à l’autre.
Excellente réponse pour le démarrage/arrêt/fonctionnement inverse.
Très fiable puisqu’il n’y a aucun balai dans le moteur. La durée de vie du moteur pas à pas dépend donc simplement de la durée de vie du roulement.
La réponse des moteurs pas à pas à des impulsions d’entrée numériques fournit un contrôle à boucle ouverte, rendant le contrôle du moteur plus simple et moins coûteux.
Il est possible de réaliser une rotation synchrone à vitesse très réduite avec une charge qui est directement couplée à l’arbre.
Une large gamme de vitesses de rotation peut être réalisée puisque la vitesse est proportionnelle à la fréquence des impulsions d’entrée.
Types de moteurs pas à pas
Il existe trois principaux types de moteurs pas à pas : à réluctance variable, à aimant permanent et hybrides. Le présent descriptif portera sur le moteur hybride, étant donné que ce type de moteur pas à pas combine les meilleures caractéristiques du moteur à réluctance variable et du moteur à aimant permanent. Ils sont construits avec des pôles de stator multi-dentés et un rotor à aimant permanent (voir figure A). Les moteurs hybrides standards ont 200 dents de rotor et opèrent une rotation à des angles de pas de 1,8º. Parce qu’ils présentent un haut couple statique et dynamique et fonctionnent à des taux très élevés de pas, les moteurs pas à pas hybrides sont utilisés dans une grande variété d’applications commerciales, dont les disques durs, imprimantes/traceurs et les lecteurs de CD. Certaines applications industrielles et scientifiques des moteurs pas à pas incluent la robotique, les machines outils, les machines bras-transfert, les machines coupe fil ou soudeuses de fil automatisées et même les dispositifs de contrôle précis des fluides.
Modes de pas
Les « modes de pas » des moteur pas à pas comprennent le mode complet, le mode demi-pas et le mode micropas. Le type de sortie du mode de pas de tout moteur pas à pas est tributaire de la conception du pilote. OmegamationMC propose des entraînements de moteur pas à pas avec sélection par commutateur des modes complet et demi-pas, ainsi que des entraînements à micropas avec résolution sélectionnable par commutateur ou par logiciel.
PAS COMPLET
Les moteurs pas à pas hybride standard ont 200 dents de rotor, ou 200 pas complets pour un tour de l’arbre du moteur. En divisant les 200 pas par les 360° de rotation on obtient un angle de pas complet de 1,8 °. Normalement, le mode complet est obtenu en mettant sous tension les deux enroulements tout en inversant le courant alternativement. Fondamentalement, une impulsion numérique à partir de l’entraînement équivaut à un pas.
DEMI-PAS
Demi-pas signifie simplement que le moteur pas à pas tourne à 400 pas par tour. Dans ce mode, un enroulement est mis sous tension et ensuite deux enroulements sont alimentés alternativement, ce qui fait que le rotor ne tourne que sur la moitié de la distance, soit 0,9 °. Même s’il fournit environ 30 % moins de couple, le mode demi-pas produit un mouvement avec moins d’à-coups que le mode pas complet.
MICROSTEP
Le micropas est une technologie relativement nouvelle pour les moteurs pas à pas, qui contrôle le courant dans l’enroulement à un degré qui subdivise davantage le nombre de positions entre les pôles du moteur. Les entraînements Omegamation à micropas sont capables de diviser un pas complet (1,8 °) en 256 micropas, résultant en 51 200 pas par tour (0,007 °/pas). Le micropas est généralement utilisé dans les applications nécessitant un positionnement précis et un mouvement sans à-coups sur une large plage de vitesses. Comme le mode demi-pas, le micropas fournit environ 30 % moins de couple que le mode pas complet.
Contrôle de mouvement linéaire
Le mouvement de rotation d’un moteur pas à pas peut être converti en mouvement linéaire en utilisant un système d’entraînement par roues à vis sans fin/mère (voir la figure B). Le rendement de la vis mère est la distance linéaire parcourue pour un tour de la vis. Si le rendement est égal à 25,4 mm (1 po) par révolution, et qu’il y a 200 pas complets par tour, alors la résolution du système de vis mère est de 0,013 cm (0,005 po)/pas. Une résolution encore plus fine est possible en utilisant le système de moteur/d’entraînement pas à pas en mode micropas.
Connexion en série ou connexion en parallèle
Il y a deux manières de raccorder un moteur pas à pas : en série ou en parallèle. Une connexion en série fournit une inductance élevée et donc un plus grand couple à basse vitesse. Une connexion en parallèle réduira l’inductance, ce qui se traduira par une augmentation du couple à une vitesse plus rapide.
Présentation de la technologie d’entraînement
L’entraînement du moteur pas à pas reçoit des signaux de pas et de direction par l’indexeur ou par le système de contrôle et les convertit en signaux électriques pour faire fonctionner le moteur pas à pas. Une impulsion est requise pour chaque pas de l’arbre du moteur. En mode pas complet, avec un moteur pas à pas standard de 200 pas, 200 impulsions de pas sont nécessaires pour achever un tour. La vitesse de rotation est directement proportionnelle à la fréquence d’impulsion. Certains entraînements ont un oscillateur intégré qui permet l’utilisation d’un signal analogique externe ou d’un levier de commande pour régler la vitesse du moteur.
Les performances de vitesse et de couple du moteur pas à pas reposent sur le flux de courant envoyé par l’entraînement à l’enroulement du moteur. Le facteur qui empêche l’écoulement, ou limite le temps nécessaire pour que le courant alimente l’enroulement, est appelé l’inductance. Les effets de l’inductance, la plupart des types de circuits d’entraînement sont conçus pour fournir une plus grande quantité de tension que celle évaluée pour le moteur. Plus la tension de sortie de l’entraînement est élevée, plus le niveau de couple-vitesse est élevé. Généralement, la tension de sortie de l’entraînement (tension de bus) devrait être évaluée comme 5 à 20 fois supérieure à la tension du moteur. Afin de protéger le moteur contre tout dommage, le courant de l’entraînement du moteur pas à pas doit être limité au niveau du courant du moteur pas à pas.
Aperçu de l’indexeur
L’indexeur, ou contrôleur, fournit les sorties de pas et de direction à l’entraînement La plupart des applications nécessitent que l’indexeur gère également d’autres fonctions de commande comme l’accélération, la décélération, la mesure des pas par seconde et en distance. L’indexeur peut également servir d’interface et contrôler de nombreux autres signaux externes.
La communication vers l’indexeur se fait par l’intermédiaire d’un port série RS-232 et dans certains cas, d’un port RS485. Dans les deux cas, l’indexeur est capable de recevoir des commandes de haut niveau depuis un ordinateur hôte et de générer les impulsions de pas et de direction nécessaires à l’entraînement.
L’indexeur comprend une entrée/sortie auxiliaire pour contrôler les entrées provenant de sources externes tel qu’un commutateur Go, Jog, Home ou Limit. Il peut également déclencher d’autres fonctions de la machine par le biais des broches de sortie de l’entrée/sortie auxiliaire.
Mode de fonctionnement autonome
En mode autonome l’indexeur peut fonctionner indépendamment de l’ordinateur hôte. Une fois téléchargés à la mémoire non volatile, les programmes de mouvement peuvent être lancés depuis divers types d’interfaces de commande, comme un clavier ou un écran tactile, ou par un commutateur à travers les entrée/sortie auxiliaires. Un système de commande autonome de moteur pas à pas est souvent fourni avec un entraînement et un bloc d’alimentation et un encodeur en option pour les applications en « boucle fermée » qui nécessitent une détection de décrochage et une compensation de la position exacte du moteur.

Contrôle multi-axes
Beaucoup d’applications de mouvement ont plus d’un moteur pas à pas à contrôler. Dans ce cas, un système de contrôle multi-axes est disponible. Un concentrateur de réseau HUB 444, par exemple, peut avoir jusqu’à quatre entraînements de moteurs pas à pas reliés à celui-ci, avec chaque entraînement connecté à un moteur pas à pas séparé. Le concentrateur de réseau fournit un mouvement coordonné pour les applications nécessitant un haut degré de synchronisation, telles que l’interpolation circulaire ou linéaire.
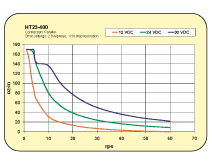 Figure C : Courbe couple-vitesse pour l’entraînement de moteur 3540i et le moteur NEMA 23
Figure C : Courbe couple-vitesse pour l’entraînement de moteur 3540i et le moteur NEMA 23
Choix d’un moteur pas à pas et d’un entraînement
Le choix d’un moteur pas à pas repose sur les besoins en vitesse et en couple de l’application. Utilisez la courbe de couple-vitesse du moteur (qui figure dans les spécifications de chaque moteur, par exemple dans la figure C) pour sélectionner un moteur qui conviendra. Chaque entraînement de moteur pas à pas de la gamme Omegamation indique les courbes de couple-vitesse pour les moteurs recommandés pour cet entraînement. Si vos besoins en couple et vitesse peuvent être satisfaits par plusieurs moteurs pas à pas, choisissez un entraînement en vous basant sur les besoins de votre système de mouvement (pas/direction, programmation autonome, entrées analogiques, micropas), puis choisissez l’un des moteurs recommandés pour cet entraînement. La liste recommandée de moteurs est basée sur des tests approfondis effectués par le fabricant pour garantir des performances optimales de la combinaison moteur pas à pas/entraînement.

Types de moteurs pas à pas

Pas et direction
Ces entraînements de moteur pas à pas acceptent les impulsions de pas et de direction, et permettent les signaux de direction/d’activation provenant d’un contrôleur comme un automate programmable (PLC) ou un PC. Chaque impulsion de pas fait tourner le moteur d’un angle précis, la fréquence des impulsions déterminant la vitesse de rotation du moteur. Le signal de direction détermine le sens de rotation (horaire ou anti-horaire), tandis que le signal d’activation met le moteur en marche ou l’éteint.

Oscillateur
Les entraînements pour moteurs pas à pas avec oscillateur numérique intégré supportent une entrée analogique ou une manette de contrôle de vitesse. Ces systèmes sont généralement utilisés dans les applications exigeant des mouvements continus plutôt que le contrôle de la position, tels que les mélangeurs, les mixeurs et les distributeurs.

Autonome et programmable
Tous ces entraînements de moteurs pas à pas peuvent être programmés pour un fonctionnement autonome; le programme de contrôle de mouvement est créé avec une interface logiciel glisser-déposer de haut niveau (fournie gratuitement), puis téléchargé et exécuté après la mise sous tension. Le programme de contrôle de mouvement attend généralement une entrée en fermant un commutateur ou en appuyant sur une touche avant d’exécuter la requête programmée.

Haute performance
Ces entraînements de moteur pas à pas offrent des fonctionnalités avancées telles que le diagnostic par autotest, la protection contre les erreurs, l’autoréglage, la régulation de l’ondulation de couple, la régulation du signal de commande et des algorithmes antirésonance. Certains entraînements sont programmables pour fonctionner de façon autonome, tandis que d’autres offrent des entrées pas/direction et analogiques. Les entraînements hautes performance fourniront la meilleure performance possible pour votre système de contrôle de mouvement.
- Avantages des moteurs pas à pas
- Types de moteurs pas à pas
- Modes de pas
- Contrôle de mouvement linéaire
- Connexion en série ou connexion en parallèle
- Présentation de la technologie d’entraînement
- Aperçu de l’indexeur
- Mode de fonctionnement autonome
- Contrôle multi-axes
- Choix d’un moteur pas à pas et d’un entraînement
- Types de moteurs pas à pas
- Avantages des moteurs pas à pas
- Types de moteurs pas à pas
- Modes de pas
- Contrôle de mouvement linéaire
- Connexion en série ou connexion en parallèle
- Présentation de la technologie d’entraînement
- Aperçu de l’indexeur
- Mode de fonctionnement autonome
- Contrôle multi-axes
- Choix d’un moteur pas à pas et d’un entraînement
- Types de moteurs pas à pas